Cronograma
sábado, 7 de septiembre de 2024
15:40
<<Cronograma.pdf>>
Unidades
domingo, 15 de septiembre de 2024
19:24
U1 - Intro a la Elec. Ind.
domingo, 15 de septiembre de 2024
19:24
<<UT Nº1-EP.pdf>>
U2 - Actuadores, Captores y protec.
domingo, 15 de septiembre de 2024
19:24
<<UT Nº2-EP.pdf>>
U3 - Semicond. De potencia
domingo, 15 de septiembre de 2024
19:25
<<UT Nº3-EP.pdf>>
U4 - Convertidores
domingo, 15 de septiembre de 2024
19:26
<<UT Nº4-EP.pdf>>

U5 - Control de velocidad y motores
domingo, 15 de septiembre de 2024
19:26
<<UT Nº5-EP.pdf>>
Guia de Estudio - Electronica de Potencia
domingo, 27 de octubre de 2024
22:46
<<Guia de Estudio - Electronica de Potencia.pdf>>

Resumen 2do parcial
domingo, 10 de noviembre de 2024
18:59
Convertidores
AC/DC
![]()


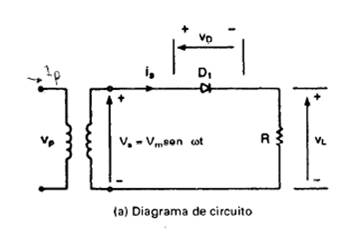
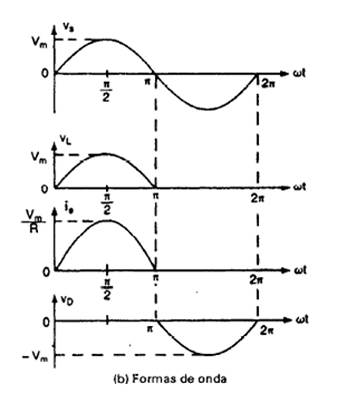
Media onda
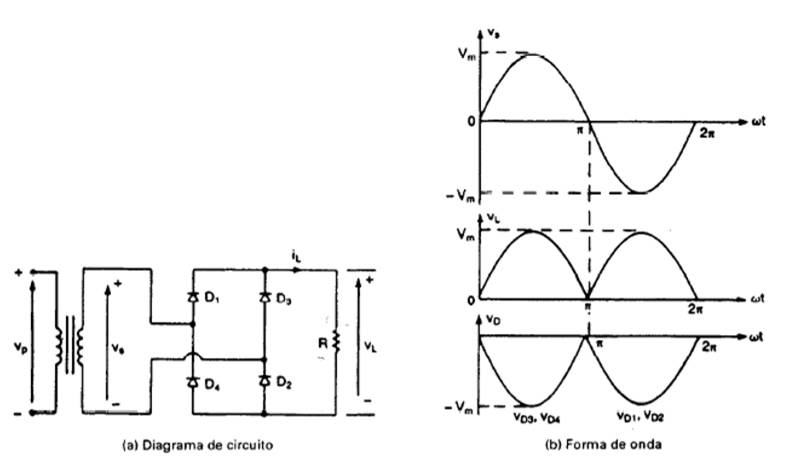
Onda completa

Trifasico carga estrella
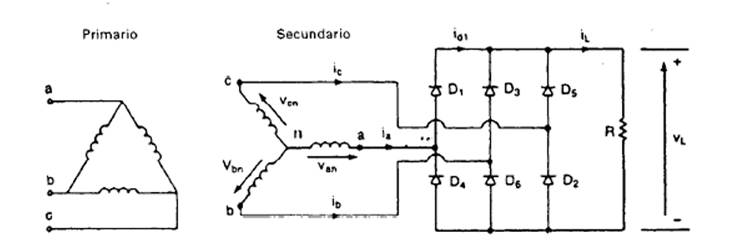
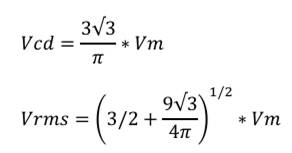
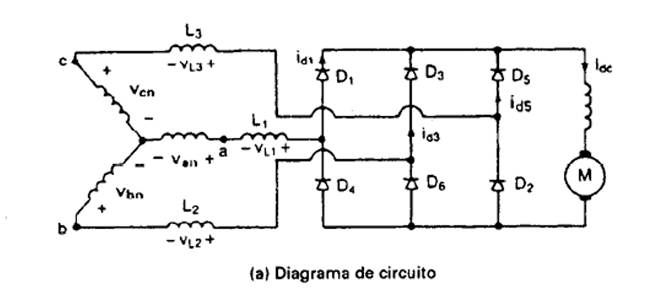
Trifasico
AC/AC
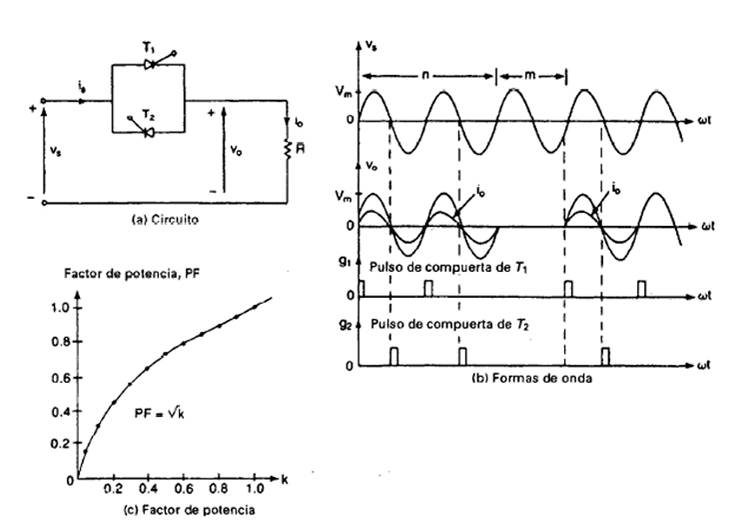
Control ON OFF
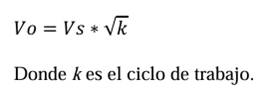
Cicloconvertidor
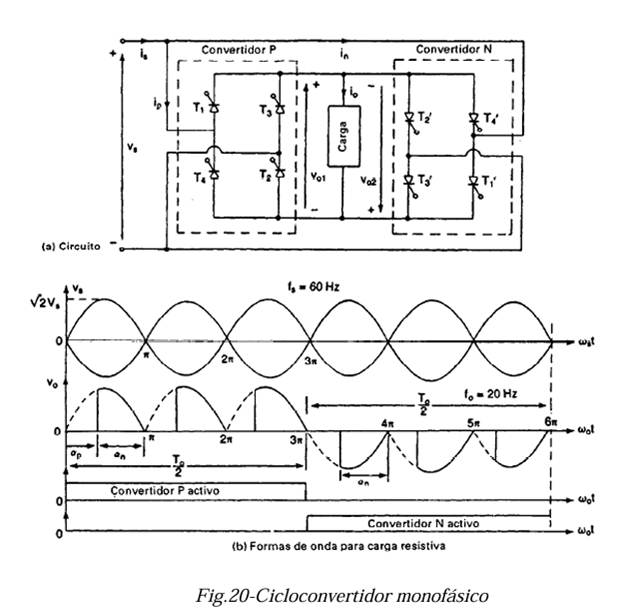
Convertidor de enlace
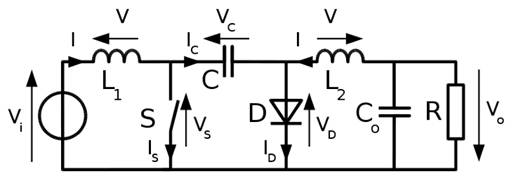
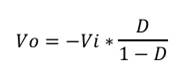
DC/DC

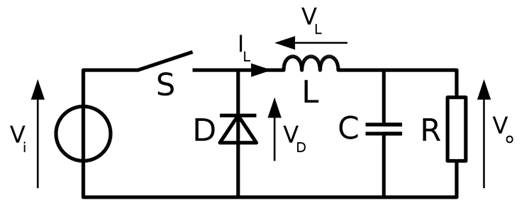
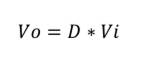
Buck
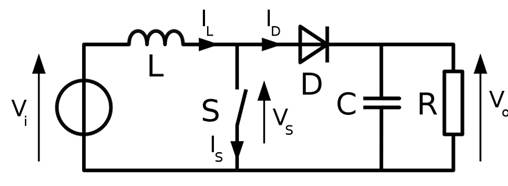
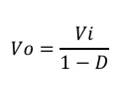
Boost
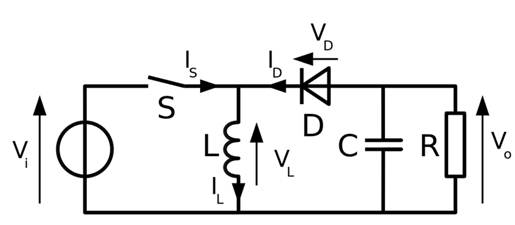
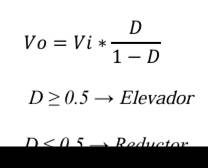
Buck-Boost
Cuk
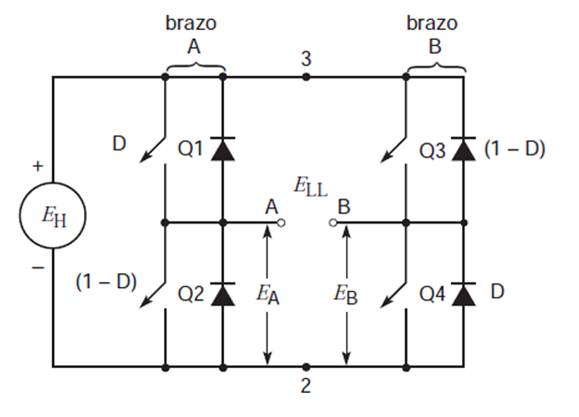
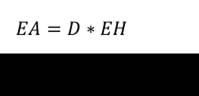
DC/AC
![]()
Motores CC
Control de velocidad en primer cuadrante
Control de velocidad en dos cuadrantes
Control de velocidad en cuatro cuadrantes
Motores de CA
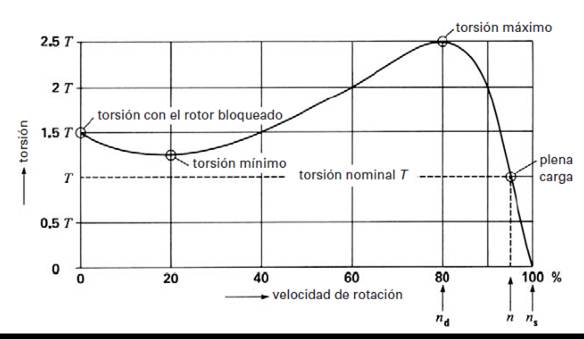
Curva de torsion velocidad
Voltaje del estator
Voltaje de rotor
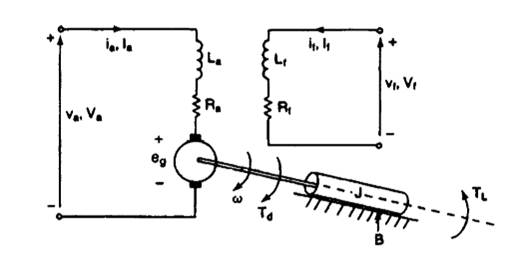
Motores de Corriente Continua (CC)
- Tipos de motores:
- Motores en derivación (o shunt): Este tipo de motor tiene el devanado de campo conectado en paralelo con el devanado de armadura. Esto permite un control preciso de la velocidad, manteniéndola relativamente constante independientemente de las variaciones en la carga. Se utiliza en aplicaciones como ventiladores y cintas transportadoras donde la estabilidad de la velocidad es esencial.
- Motores en serie: El devanado de campo está conectado en serie con la armadura, lo que genera un par muy alto al arranque. Este tipo de motor es ideal para aplicaciones que requieren un arranque fuerte, como herramientas eléctricas portátiles o trenes eléctricos, ya que la velocidad varía según la carga.
- Motores compuestos: Combinan características de motores en derivación y en serie, ofreciendo tanto un alto par de arranque como una buena regulación de velocidad. Esto los hace apropiados para elevadores y grúas donde se requiere ambas características.
- Ecuación característica:
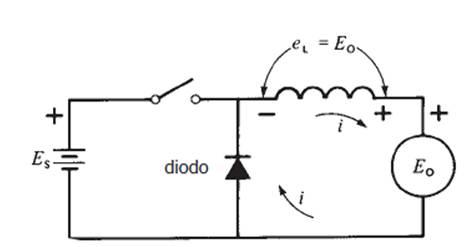
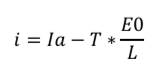
- La velocidad de un motor de excitación independiente se relaciona con la tensión de armadura ( V_a ) y la corriente de campo ( I_f ). La fuerza contraelectromotriz ( E_o ) depende directamente de la velocidad y de la corriente de campo, mientras que el par desarrollado ( T_d ) es proporcional a la corriente del campo y de la armadura. Esto significa que para controlar la velocidad se puede manipular la tensión de armadura, la corriente de campo o el par motor de la carga.
- Control de velocidad:
- Control de voltaje de la armadura: Al variar el voltaje de la armadura se modifica la velocidad del motor. Un incremento en el voltaje resulta en un incremento de la velocidad.
- Control de la corriente de campo: Reducir la corriente de campo incrementa la velocidad, ya que disminuye la fuerza contraelectromotriz. Este método ofrece un control muy fino de la velocidad y se usa cuando se requiere variaciones amplias de velocidad.
- Control mediante par motor: Para una corriente fija de campo, el par depende de la corriente de la armadura. Ajustando la corriente de armadura se puede modificar el par, y por lo tanto la velocidad bajo ciertas condiciones de carga.
- Control por cuadrantes: Los cuadrantes se refieren a las diferentes combinaciones de dirección de movimiento (adelante/atrás) y tipo de operación (motor/generador) que un sistema de control de velocidad de un motor puede realizar. Cada cuadrante representa una de estas combinaciones. A continuación, se describen los tipos de control por cuadrantes:
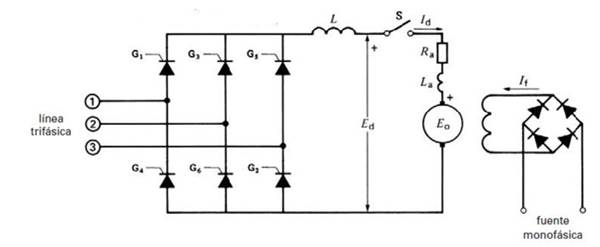
- Un cuadrante: El control de velocidad se realiza utilizando un convertidor trifásico de 6 pulsos conectado a la armadura y un rectificador monofásico para el campo. Este tipo de control solo permite movimiento hacia adelante (primer cuadrante), adecuado para aplicaciones donde no se requiere inversión del sentido del giro.
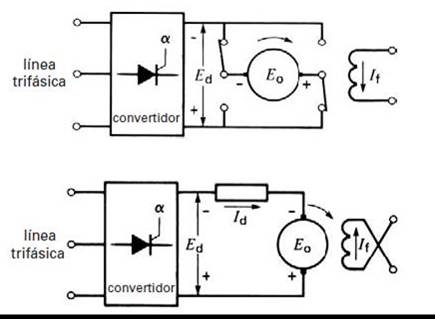
- Dos cuadrantes: Este control permite acelerar o desacelerar el motor, incluso hacer que actúe como generador mediante frenado regenerativo. El motor puede funcionar tanto en modo motor como generador, retroalimentando energía a la línea para disminuir la velocidad rápidamente.
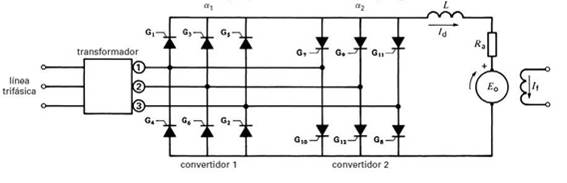
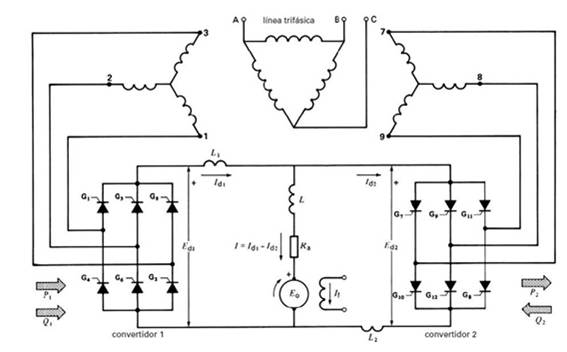
- Cuatro cuadrantes: En este modo, se usan dos convertidores conectados en paralelo inverso para controlar la velocidad y el sentido del giro del motor. Esto permite al motor operar en los cuatro cuadrantes, controlando tanto la aceleración como el frenado en ambos sentidos de giro. Es muy útil en aplicaciones industriales donde se requiere una operación reversible continua, como en sistemas de izaje y transportadores reversibles.
Motores de Corriente Alterna (CA)
- Tipos de motores:
- Motores de inducción trifásicos: Se clasifican en motores de jaula de ardilla y de rotor devanado.
- Motores de jaula de ardilla: Son los más comunes en la industria, ya que son robustos, fáciles de mantener y económicos. El rotor tiene barras de cobre o aluminio conectadas en cortocircuito por anillos en los extremos. Son ideales para aplicaciones donde no se requiere variación de velocidad frecuente.
- Motores de rotor devanado: Tienen un devanado de rotor conectado a anillos colectores, permitiendo conectar resistencias externas y controlar el par y la velocidad. Se utilizan donde se requiere control de arranque suave y variación de velocidad, como en grúas y elevadores.
- Métodos de control de velocidad:
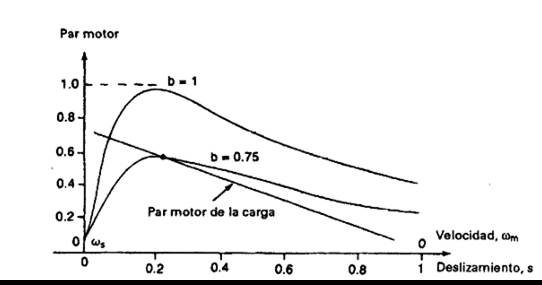
- Control de voltaje del estator: Al reducir el voltaje aplicado al estator se disminuye el par desarrollado y, por ende, la velocidad del motor. Este método es simple, pero la eficiencia puede ser baja debido a las pérdidas en el devanado del estator.
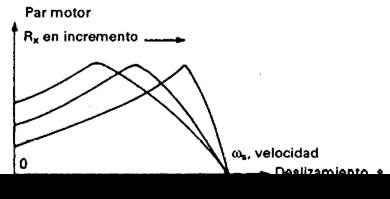
- Control del voltaje del rotor: Utilizado en motores de rotor devanado, donde resistencias externas conectadas al rotor incrementan el deslizamiento, disminuyendo la velocidad. Permite una regulación suave de la velocidad, particularmente útil en condiciones de arranque con alta carga.
- Control de frecuencia: Ajustar la frecuencia de la fuente de alimentación modifica la velocidad sin afectar la eficiencia del motor. Este método es altamente eficiente y se emplea comúnmente en variadores de frecuencia (VFDs) para aplicaciones donde se requiere control preciso de la velocidad.
- Control de voltaje y frecuencia (Volts/hertz): Se mantiene constante la relación entre voltaje y frecuencia para mantener el flujo constante en el motor, logrando un control suave y eficiente del par a diferentes velocidades.
- Control de corriente del estator: Permite modificar el par motor variando la corriente de entrada. La regulación de la corriente es útil para aplicaciones donde se requiere mantener un par constante bajo condiciones variables de carga.
- Tipos de controladores:
- Cambiadores de frecuencia estáticos: Estos dispositivos convierten directamente la frecuencia de línea en la frecuencia requerida por la carga. Los cicloconvertidores son un ejemplo, y se usan en aplicaciones de baja velocidad y alto par como molinos.
- Controladores de voltaje estáticos: Se usan para variar la velocidad del motor mediante control del voltaje de entrada. Comúnmente se usan para aplicaciones de arranque suave en motores de jaula de ardilla.
- Sistemas rectificador-inversor con conmutación de línea: Convierte corriente alterna en corriente continua y luego nuevamente en corriente alterna. Se utiliza principalmente para motores sincrónicos.
- Sistemas de modulación por ancho de pulso (PWM): Utilizan dispositivos de conmutación rápida como IGBTs para controlar motores de inducción con velocidades variables desde cero. Este tipo de control permite una mayor eficiencia y menor pérdida de potencia.
- Control vectorial:
- En el control vectorial se busca mantener la corriente del estator en una orientación que maximice el par producido por el rotor. Este tipo de control analiza las corrientes del estator y del rotor para producir un flujo óptimo en el entrehierro. Utiliza un modelo matemático del motor y un codificador para determinar la posición del rotor y ajustar las corrientes en tiempo real. Este tipo de control es crucial para aplicaciones de alta precisión como robots industriales y servomecanismos.
- Arranque suave:
- En muchas aplicaciones industriales, como bombas centrífugas o bandas transportadoras, el arranque suave es esencial para evitar daños mecánicos o sobrecargas eléctricas. Los arrancadores suaves controlan el voltaje aplicado al motor para incrementar progresivamente la velocidad, evitando los picos de corriente que se producen al arrancar a plena carga. Al reducir gradualmente el voltaje, se garantiza que el par sea suficiente para vencer la inercia sin causar estrés innecesario en la maquinaria.
En resumen, el documento aborda de manera profunda los distintos métodos de control de velocidad de motores, tanto de corriente continua como de corriente alterna, proporcionando una comprensión integral sobre cómo se pueden aplicar técnicas modernas de electrónica de potencia para lograr un control eficiente y preciso en aplicaciones industriales diversas.